

Jedes wissenschaftliche in-situ-Experiment wie auch Probennehmer benötigen zusätzlich zum eigentlichen Front-End-Gerät eine Infrastruktur, die für das Instrument neben der mechanischen Einbettung auch verschiedene Versorgungsfunktionen übernimmt. Zum einen müssen die eigentlichen (Mess)Instrumente zum gewünschten Ziel geführt werden und zum anderen müssen Stromversorgung, Energiemanagement, Datenaustausch, Kommunikation sowie mechanische und thermisch Stabilität gewährleistet sein. Die Systeminfrastruktur ist somit das stützende Glied zwischen mehreren Instrumenten und dem Anwender/Wissenschaftler und sorgt auch für eine Verbindung der Instrumente aus der lebensfeindlichen Umgebung zum Bediener des Instrumentes. Einige dieser Infrastrukturelemente sind unabhängig von ihrer Umgebung und können sowohl für die Raumfahrt als auch für die Tiefsee entwickelt werden (z. B. Energiemanagement, Datenmanagement, Vernetzung bzw. Koordination mehrerer Instrumente). Für beide Umgebungen sind bereits Infrastrukturen realisiert worden, die entweder mobil (Mond-Rover vs. AUV in der Tiefsee) sind oder stationär (Mondlandungs-Plattformen vs. Meeresboden Lander) sowie in Kombination arbeiten. Neu in ROBEX werden eine erhöhte Autonomie, Rekonfigurierbarkeit und Modularität der Systeme sowie eine gewisse Standardisierung der Schnittstellen sein.
Folgende Bereiche werden im Thema 2000 bearbeitet:
Rekonfigurierbarkeit, Modularität und Standar-disierung (AP 2100)
Infrastrukturen für Navigation und Kommuni-kation (AP 2200)
Energieversorgung/ Energiemanagement (AP 2300)
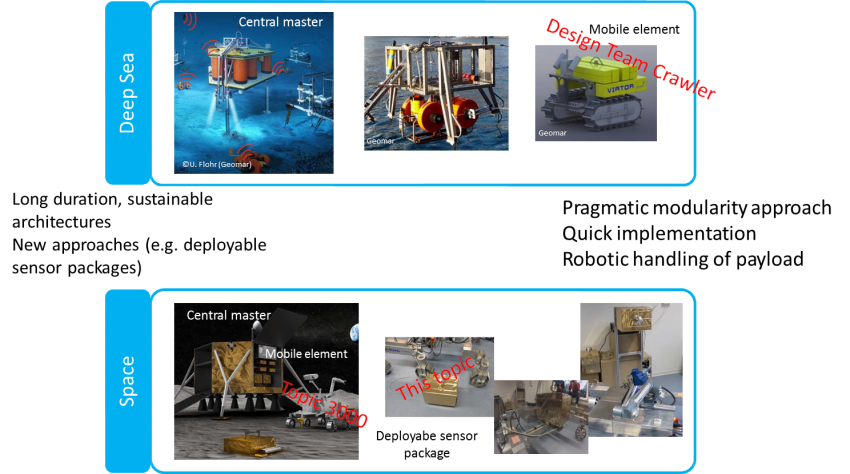
 Thema 2000 – Infrastruktur
Thema 2000 – Infrastruktur