

Die Exploration von Tiefsee und Mond erfordert in zunehmendem Maße unbemannte mobile Systeme und geschickte Manipulationsgeräte, um in diesen extremen Umgebungen sehr effizient und weiträumig Erkundungen durchzuführen. Neben dem bewährten Einsatz ferngesteuerter Systeme kommt aber gerade den halb- oder gar vollautonom betriebenen Systemen eine herausragende Stellung zu. Wegen ihrer besseren Erreichbarkeit und wesentlich niedrigeren Kosten sind Explorationen in die Tiefsee weit häufiger, und die Anzahl ihrer Operationsvehikel (AUV und ROV) ist weiter fortgeschritten als in der Raumfahrt. Für die Oberflächenerkundung von Planeten und Monden hingegen spielt die Autonomiefähigkeit der eingesetzten Systeme eine dominante Rolle, weniger oder gar nicht der Teleoperationsmodus, wodurch die Entwicklung vollautonomer Fähigkeiten in der Raumfahrt in den vergangenen Jahren sehr stark forciert wurde. Eine kleine Anzahl solcher Systeme mit noch beschränkten autonomen Fähigkeiten haben bereits ihren Einsatz sehr erfolgreich auf der Marsoberfläche demonstrieren können (NASA Rover). Trotz der bisher erzielten Fortschritte sind noch wesentlich stärkere Entwicklungsanstrengungen notwendig, um gerade den wissenschaftlichen Gewinn aus den explorierten Gebieten mit Hilfe autonomer robotischer Systeme zu steigern. Funktionalitäten wie hohe und anpassungfähige Mobilität, präzise und geschickte Handhabung, vollautonome Betriebsmoden der robotischen Systeme in weit entfernten und extremen Explorationsgebieten sind daher eminent wichtig für den Erfolg der Missionen, ob in der Tiefsee oder auf dem Mond. Heutzutage erkunden robotische Systeme die Tiefsee bereits in Form von ROVs, AUVs, Unterwassergleitern und in kleinem Maße auch mit Hilfe von Rovern und Raupenfahrzeugen. Sie werden von einem begleitenden Schiff abgesetzt und größtenteils ferngesteuert. Einige der Systeme kommen auch als Teile von sog. „Deep Sea Cabled Observatories“ zum Einsatz.
In ROBEX sollen nun die robotischen Fähigkeiten für zwei Hauptanwendungen näher untersucht und entwickelt werden: Zum einen, der Aufbau einer großen Basisstation, an die mobile Einheiten mit Roboterarmen versehen mit unterschiedlichen Funktionen andocken können. Diese können auch für den Aufbau und die Rekonfiguration der Station selbst eingesetzt werden. Zum anderen, die Entwicklung geeigneter mobiler und Manipulationssysteme, um in weiträumiger Umgebung der Basisstation effizient wissenschaftliche Instrumente zu transportieren, eventuell auf dem Boden abzusetzen, Bodenproben zu nehmen, und diese Proben zurückzubringen zu Prozessierungseinheiten an der Station. Dies betrifft sowohl die Tiefsee- als auch die Mondaktivitäten innerhalb von ROBEX. Für die Mondanwendung wird in einem ersten Entwurf der Aufbau eines aktiven seismischen Netzwerkes angestrebt, das das Ausbringen mehrerer räumlich voneinander entfernter Seismometer beinhaltet sowie einer oder mehrerer aktiven seismischen Quellen. Gegenüber bisherigen Realisierungen sind hierzu sowohl deutlich erhöhte Autonomie- und Manipulationsfähigkeiten gefragt als auch neue Docking- und Interface-Entwicklungen für das Aufnehmen und Absetzen der Instrumente und das Koppeln an Module zur Energieaufnahme der Fahrzeuge. Wissenschaftlich ist man bei diesem Netzwerk an der Untersuchung des Mondbodens und dessen Gesteinszusammensetzung bis zu einigen Tausend Metern Tiefe interessiert. Die wissenschaftliche Zielsetzung und Fragestellungen werden in Thema 1000 erarbeitet und bestimmen das gesamte Designkonzept der Station und die notwendige Entwicklung bestimmter zusätzlicher wissenschaftlicher Instrumente. Fragen nach geeigneten Plätzen für den Aufbau der Basisstation, deren Konstitution und Aufgaben sowie der zu entwickelnden Funktionalitäten werden im Thema 2000 adressiert. Instrumente werden im Thema 4000 definiert und deren Funktionalitäten bereitgestellt; die Operationseinheiten wie Energie- und Kommunikationsmodule werden im Thema 2000 untersucht. Die robotischen Entwicklungen im Thema 3000 werden dann an diesen Vorgaben ausgerichtet, wobei sinnvollerweise ein interagierender Entwicklungsweg, der durch ständigen Austausch zwischen den einzelnen Topics stattfinden wird, den Erfolg der entwickelten Systeme in ROBEX garantieren soll.
Das Thema 3000 beinhaltet die Arbeitspakete Autonome Operationen (AP 3100), Mobilität (AP 3200) und Manipulation (AP 3300).
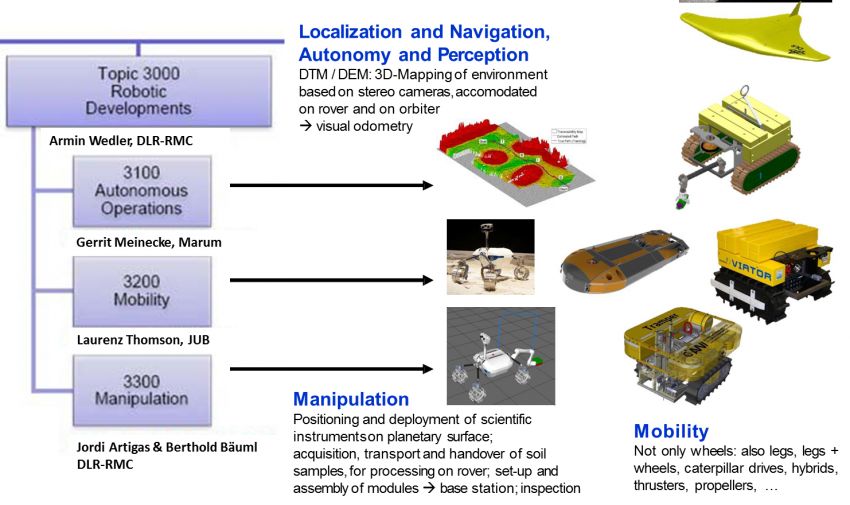
 Thema 3000 – Robotische Entwicklungen
Thema 3000 – Robotische Entwicklungen