

Für bestimmte Bereiche in der wissenschaftlichen Erforschung der Tiefsee- und Mondumgebung ist die Mobilität der jeweiligen Forschungsplattform unerlässlich. Historisch gesehen wurden Lander auf planetaren Körpern und auf dem Boden der Ozeane an einem bestimmten Ort abgesetzt und verankert, eine Bewegung war somit nicht mehr möglich. Sowohl in der Tiefsee als auch in der Planetenforschung geht der Trend zunehmend in die Richtung mobile Systeme zur Beobachtung von Umweltveränderungen über einen Bereich von räumlichen Skalen zu entwickeln. Die neueste Generation der Mars-Rover, der von der Jacobs University Bremen betriebene Tiefsee Crawler Wally und die verschiedenen autonomen Unterwasserfahrzeuge (AUV) vieler Meeresforschungsinstitute sind Beispiele dafür.
Innerhalb von ROBEX sollen neue Techniken für die Mobilität bei der Erkundung der Tiefsee und des Mondes entwickelt werden. Neue Technologien für die Flächenkartierung um ein Fahrzeuge herum, automatisch ermittelt aus Bilddaten, sind in der Entwicklung und mehrere neue Fahrzeugkonzepte werden für einen optimalen Zugang für extreme Umgebungen untersucht.
Der Tiefsee Hybrid Rover (H-ROV, Fig. 1) ist eine Entwicklung vom Marum welches später in der Lage sein soll, mit Hilfe von Triebwerken die Umgebung unter dem Eis teilautonom zu erkundenen. Der Tiefsee Crawler Wally, ausgestattet mit Raupenketten, soll Erkundungen am Meeresboden (Fig. 2) durchführen. Die Anwendbarkeit dieser beiden Systeme für autonome Operationen im Unterwasserbereich wird untersucht.
Das Aktive Seismic Network (ASN, Fig. 3) Mond–Szenario beschreibt Fahrstrecken im 10 km–Bereich über mehr oder weniger moderate Oberflächen, die ein mit Rädern versehenen Rover erfordern. Energiespeichererung, Datenübertragung und Kommunikation mit einem Basis–Lander sowie autonome Navigation werden als wichtige Schlüsselthemen betrachtet. Geometrische und strukturelle Dimensionierung, die richtige Wahl der Federung sowie Bewegungskonzepte (Suspension Kinematik, Motorisierung, Räder) sind im Vordergrund des Interesses und werden weiterer untersucht. Diese Untersuchungen gehen Hand in Hand mit denen zum Roboter-Arm-Design (WP 3300) und der Entwicklung der seismischen Instrumente, die vom Rover getragen und mit Hilfe des Roboterarms manipuliert werden. Neben den eher traditionellen Rädern mobiler Systeme, die sicherlich ihre Vorteile in mäßig geformten Geländen beim Transport von Instrumenten entfaltet, werden innerhalb von ROBEX auch Nicht-Räder-Systeme wie z.B. krabbelnde Roboter für sehr unebenes und steiniges Gelände entwickelt und getestet. Die existierende DLR Laufroboter soll z.B. weiter für den möglichen Einsatz in Moon Explorationsszenarien untersucht werden. Für die Optimierung hin zu einer robusteren und schnelleren Bewegung der zukünftigen sechsbeinigen Laufroboterhat das DLR verschiedene vereinfachte Modelle (planar und 3D) unter Berücksichtigung von passiven konformen Elementen in den Beinen simuliert und analysiert.
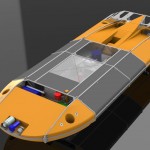
Fig 1. Ferngesteuertes Tiefsee-Hybrid-Fahrzeug (H-ROV) © MARUM

Fig. 2 Tiefsee Kettenfahrzeug Wally der Jacobs University © NEPTUNE Canada
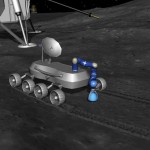
Fig. 3 Visualisierung des aktiven seismischen Netzwerkes (ASN) Mond-Szenario © DLR-RMC
