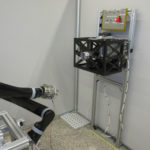
Vom 27.-29. Juni 2016 wurde im Robotik und Mechatronik Zentrum des DLR Oberpfaffenhofen erfolgreich ein Teilschritt hin zu einer erfolgreichen Mond-Analogmission gemacht. Im Rahmen der Mond-Analog-Mission soll u.a. gezeigt werden, dass der Roboter LRU (Lightweight Rover Unit) autonom in der Lage ist, insgesamt vier Seismometer-Instrumentenpakete von dem Mond-Landegerät zu greifen, diese nacheinander in einen Korb auf seinen Rücken zu legen und für eine seismische Messung gezielt an spezifischen Stellen auf dem Boden so abzulegen, dass diese erfolgreich ist. Die zentralen Vorgänge, nämlich „Greifen“, „Manipulieren“ und „Umpositionieren“ konnten im Rahmen des Systemtests mit dem realen Roboterarm im Zusammenspiel mit verschiedenen vorläufigen Teilsystemen demonstriert werden.






 Ein weiterer Schritt auf dem Weg zur Mond-Analog-Mission auf dem Etna: Teilsysteme konnten erfolgreich getestet werden
Ein weiterer Schritt auf dem Weg zur Mond-Analog-Mission auf dem Etna: Teilsysteme konnten erfolgreich getestet werden