The aim of this design team is the definition and development of appropriate docking interface systems for both ROBEX scenarios. Depending on the way and found a functional model is constructed to the prototype for each of the two disciplines and validated by tests.
The docking interface is supposed to be an interface for the autonomous or telerobotic mechanical, electrical, signal technology and thermal coupling of two systems.
Interfaces are generally needed between almost all units of exploration equipment such as landers, vehicles (Rover, crawlers), manipulators and tools or instruments. The individual components have to communicate data, energy or have to transmit fluids between the mechanical connections of two units.
Due to the different tasks of these units different designs are necessary, but the modular approach is a fundamental criterion. For example, the power and data transfer should be possible with a replaceable module within the interface system – wirelessly or with a plug connection – .
The latest developments are dealing with
- an interface system for wireless power and data transmission between deep sea landers and crawlers,
- an interface between “Moon”-Lander and payload elements and
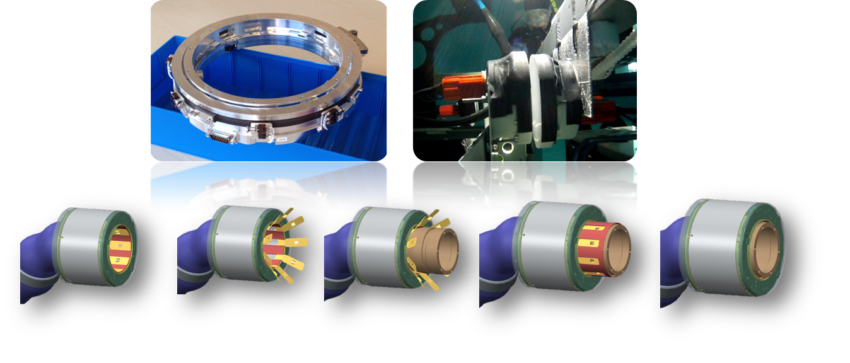
- a docking interface system between a robot arm and the payload elements.
The latter was developed and constructed based on a novel docking process between robot arm and standard payload boxes or scientific instruments. Thus, to support future partially automated exploration tasks a repeatable, robust and especially safer docking process under extreme environmental conditions will be possible.
Contact: armin.wedler@dlr.de