

Der autonom und kabellos operierende AWI Crawler TRAMPER soll per Videoüberwachung mittels Schiffswinde und Releaser ausgesetzt werden. Nach erfolgreicher Mission, angestrebt ist hier ein Einsatz von bis zu einem Jahr, wird ein akustisches Signal von einem Schiff zum Crawler gesendet, der daraufhin Ballastgewichte abwirft und selbständig auftaucht. Ebenfalls soll ein satellitengestütztes Ortungssystem (Argos) integriert werden, welches bei Fehlverhalten (frühzeitiges Auftauchen) ein Signal mit genauer Position des Fahrzeugs sendet. Aufgrund des geplanten Langzeiteinsatzes des AWI-Crawler-Systems liegt der Fokus bei der Entwicklung eines höchst sparsamen und intelligenten Energie-Management-Systems.
Der TRAMPER wird aktuell für seinen einjährigen in situ Einsatz im Rahmen der FS Polarstern Expedition 2016 im „HAUSGARTEN bei Spitzbergen vorbereitet.
Dieses autonom agierende Gerät wurde bislang nur ein einziges Mal während einer Expedition mit dem Forschungsschiff „Sonne“ im östlichen Pazifik eingesetzt. „Tramper“ ist mit einem Mikroprofiler ausgerüstet, der ein Jahr lang, einmal pro Woche Sauerstoffprofile am Meeresboden messen soll, anschließend eine kurze Strecke fahren soll, um dann einen Monat später die nächste Messung vorzunehmen usw. usw. usw. Über die gewonnenen Sauerstoffprofile kann auf Remineralisierungsraten im Oberflächensediment zurückgeschlossen werden. Ob „Tramper“ seine Arbeiten wie geplant durchführen konnte, wird mit Spannung erst nach seiner Bergung während einer „Polarstern“-Reise im Sommer 2017 erwartet.
Kontakt: frank.wenzhoefer@awi.de; sascha.lehmenhecker@awi.de; johannes.lemburg@awi.de
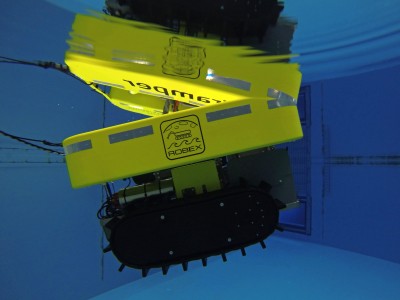
© AWI | TRAMPER während des 1. Testeinsatzes im DFKI Tiefsee-Explorationsbecken
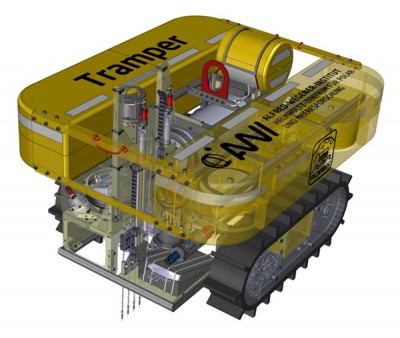
© AWI | Tiefsee Kettenfahrzeug TRAMPER Seitenansicht
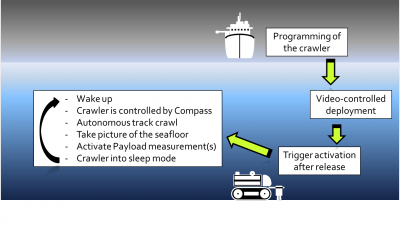
© AWI | Missionsplanung für den TRAMPER-Einsatz am Meeresboden
 TRAMPER
TRAMPER